
低侵襲手術用ロボット
手術支援システムda Vinci™S HD(ダ・ヴィンチサージカルシステム)の最新バージョンで使用されている主要構成部品のひとつが、高性能のモータです。そのモータは、低速でもスムーズに機能する条件を満たします。
今日、要求度の高い最新式の外科手術には、アメリカ合衆国カリフォルニア州サニーベールに本社を置くインテュイティヴ・サージカル社 (Intuitive Surgical Inc.) のダ・ヴィンチサージカルシステムが使用されています。このシステムにより低侵襲の手術が可能になったのです。システムには運動制御の最先端技術が応用されているため、手術器具が、まるで経験を積んだ外科医のような滑らかで正確な動きを――極端にゆっくりしたスピードでも同様に――とることができます。インテュイティヴ・サージカル社は、ダ・ヴィンチサージカルシステムを改良するにあたって、最新式の既製部品および制御要素を採用しました。それにより、ダ・ヴィンチを用いた救命手術の信頼性が更に高まりました。そのダ・ヴィンチシステムには、39個のマクソンが組み込まれています。
手術支援システム
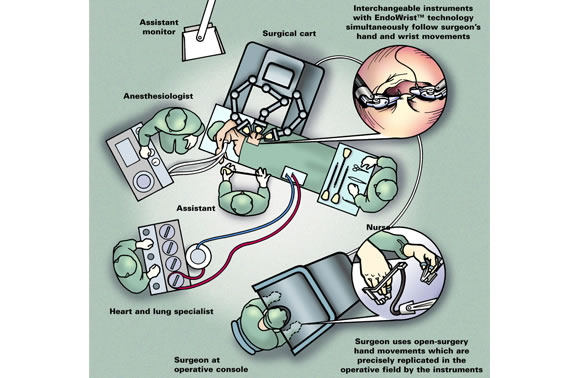
手術支援システムでは、手術用マニピュレーター2つと内視鏡カメラ1台を患者の体内に挿入するため、3箇所の8 mmあるいは12 mmの小さな切開部が必要となります。患者の側に付いているのはロボットと手術助手だけであり、実際にシステムを操作する執刀医は、手術室の別の場所に置かれたサージョンコンソールの前に座ります。モニター画面上には、切開手術が「目で見」て「感じる」ように正確に再現されます。
ダ・ヴィンチサージカルシステムは、手術室の一部となり、手術に参加するスタッフそれぞれの要求にそってチーム全体をサポートすることになります。システム全体は3つの主要コンポーネント(操作を行うインターフェイス(サージョンコンソール)、手術台脇に設置された手術器具を取り付けるためのアーム(ペイシェントカート)、画像処理ユニット(ビジョンカート))から成ります。
サージカルシステムの中核をなすのがサージョンコンソールで、ここから執刀医が手術を完全にコントロールすることができます。ビデオ中継によるその他の手術システムを使った実験では、その方法が劣ることが判明しています。医者にとって最も大きな困難は、手の動きの方向がミラー反転されてしまうことでした―――箸を使って靴紐を結ぶことを想定してください。つまり箸を左に動かすと紐の先が右に移動するのです。従来の腹腔鏡手術では、このような人間の直感に逆らう動きが生じていました。外科医は経験を積みながら、この直感に逆らう動作を習得しなければならなかったのです。
ダ・ヴィンチサージカルシステムが導入されたことで、執刀医はサージョンコンソールの前に座り、それまで無かった3Dの高解像度画像で手術部位を見ながら、施術することが可能になりました。本システムは、高解像度の3Dディスプレイを搭載した世界初の手術ロボットシステムであり、解像度が旧モデルの二倍、表示画像がさらに鮮明になり、組織層や細部の構造の詳細まで見ることができるよう改良されました。InSite™光学システム、高解像度の3D内視鏡、そして画像処理モジュールが、手術部位のリアルな画像を提供します。画像の同期化、高照度のイルミネータ、そしてカメラコントロールユニットにより、手術画像の選択幅が拡がり精緻になりさらに最適になりました。
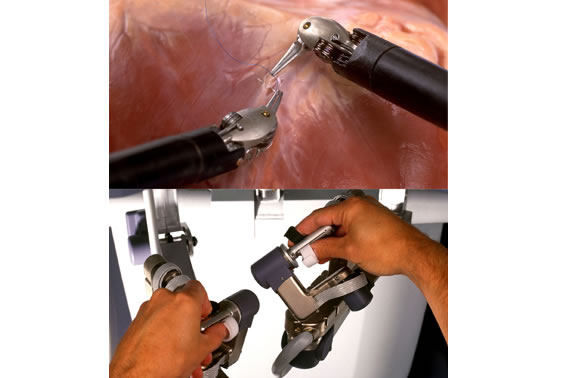
またサージョンコンソールでは、執刀医はマスターコントローラ(手術で行われる動きをシミュレートする制御要素)を使って動きを制御します。執刀医が画像表示の下にあるマスターコントローラを指でつかむ際、手首は自然に視界に入る位置にあります。そして執刀医が手を動かすと、その動きがリアルタイムで正確に患者の体内にある手術器具の動きへと変換されます。
手術器具を取り付けられたロボットアームは、従来の手術同様、執刀医の手首・手・指の動きで操作されます。本システム用の手術器具としてEndoWrist™インストゥルメントが多様なラインナップを取り揃えています。これらの内視鏡用手術器具は、人間の手首をモデルに設計されており、動きには7段階の選択肢があります。各器具は止血・縫合・組織の把持など特定の手術段階のために設計されています。
手術台わきのカートには、執刀医の手の動きを真似るロボットアーム2本と、内視鏡を取り付けたアーム1本が収納されています。追加で3本目のロボットアームを取り付けることも可能です。執刀医が内視鏡用器具やその他手術の上での必要に応じて器具を追加使用することが可能です。腹腔鏡用器具は切開部のすぐそばに旋回軸が位置するよう設計されているため、患者の腹壁を吊り上げる必要がなくなりました。それにより組織や神経の損傷を最小限に抑えることができます。手術アシスタントは正しい器具を取り付け、患者の体内にゾンデを挿入する準備をし、手術で使用される腹腔鏡用アームと器具を監視します。
モータの選択
患者の体に開けられた8~10 mmの小さな切開部にロボット器具を挿入して行う手術においては、微細な動きを正確に制御することが非常に重要となります。そのマニピュレーターの心臓部がマクソンが開発・製造されたDCモータなのです。
インテュイティヴ・サージカル社の生産工学担当マネージャーであるマイク・プリンディヴィル氏はこう語ります。「市場には製品選択のオプションがたくさんありますが、中でもマクソンは強力なパートナーとして、我々の性能・品質への要求を一貫して満たしてくれました。」マクソンのモータは、ダ・ヴィンチシステムに入力信号/出力信号を送信します。モータとエンコーダは、一連のフィードバック制御を介して、執刀医からの入力信号を受け取ります。この入力信号が、システムコンソール内の電子回路でリアルタイムでコンパイルされ、マニピュレーター内のモータ用の出力信号に変換されます。さらにコンソール内の電子回路を介して、マニピュレーターが執刀医の手に触知可能な抵抗を与えます。
インテュイティヴ・サージカル社のエンジニアたちは、システムにDCコアレスモータRE25(エンコーダ付き、なし)、RE13(+GP13プラネタリギアヘッド、直径13 mm磁気エンコーダ)、RE35(+他社製エンコーダ)が含む30個以上のマクソンを組込みました。
マクソンのモータはレアアース磁石とコアレスロータを有しています。その構造からモータはコギングトルクがなくなり、旧来の構造を持つモータと比べ、とりわけゆっくりとした動作速度における利点となりました。モータはそれ以外にも、高い出力密度と低騒音、つまりインテュイティヴ・サージカルが掲げる両基本要件をあわせ持ちます。
執刀医側のカートで使用されるモータは二次元での役割を識別するためにマスターと呼ばれます。実際に執刀する側のマニピュレーターのモータは、同様の精度を要求するだけでなく、手術助手がロボットの先端部分(エンドエフェクタ)を手術する位置まで移動させる間、手動でもモータ軸が回されるバックドライバビリティ性が必要となります。モータは先端部分で低いヒステリシス(履歴現象)を示します。
まとめ
ダ・ヴィンチサージカルシステムは、手術器具の直感的コントロール、自由な動き、生体組織のデリケートな取り扱い、そして切開手術のような3次元可視化を外科医に可能にした唯一の市販機器です。外科医は小さな切開部から低侵襲手術を行うことができます。最新技術のモータやその他の部品を使用することで初めて、そのような手術支援システムの開発が可能になったのです。
ダ・ヴィンチサージカルシステムは、SRIインターナショナル(旧スタンフォード研究所)で開発されたロボット援用手術のための基礎技術をベースにしています。インテュイティヴ・サージカル社はその後、本システムを改良するにあたって、IBM、マサチューセッツ工科大学、ハートポート社 (Heartport Inc.) らの機関と提携してきました。また本システムはアメリカ食品医薬品局 (Food and Drug Administration, FDA) から、胆嚢や大腸などの腹部手術、胸部手術(心臓手術を除く)、前立腺手術のための承認を受けています。ヨーロッパではすでにダ・ヴィンチシステムを使っての心臓バイパス手術が行われました。
「世界中の患者、外科医、病院に安全なシステムを提供するため、我々は日々1万個以上のマクソンに全幅の信頼を寄せていますマクソンは、高信頼性、低摩擦、長寿命の観点において素晴らしい成果をあげてくれています。すべてのダ・ヴィンチシステムは、摩擦や遊びといった特性、適合性、ならびに各種センサのフィードバックを監視するための厳しい性能テストを通過しています。」インテュイティヴ・サージカル社の生産工学担当マネージャー、マイク・プリンディヴィル氏はこう付け加えました。
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}