
マクソンがロボットハンドを動かす
人の動きを忠実に再現するロボットハンドの開発は急速に進んでいます。4本指と親指で繊細な動きをするグリッパが、夢ではなく現実のもの となるのです。マルチフィンガーのロボットハンドが業務用に実用化されるのも、そう遠い先のことではありません。従来のシンプルで堅牢な2~3本指構造グ リッパに取って代わり、複雑な5本指のロボットハンドが繊細な作業を引き受けることになるのです。マイクロエレクトロニクスおよびマイクロマシンの分野が 大きな進歩を遂げたことで、個別に制御される指、そして人間の手をモデルに作られた関節を持つマルチフィンガー・ロボットハンドの製造が可能になりまし た。しかも、そのために必要となる複雑な機械系やコントロールユニットの一部に、市販の標準コンポーネントを組み込むことさえ可能なのです。
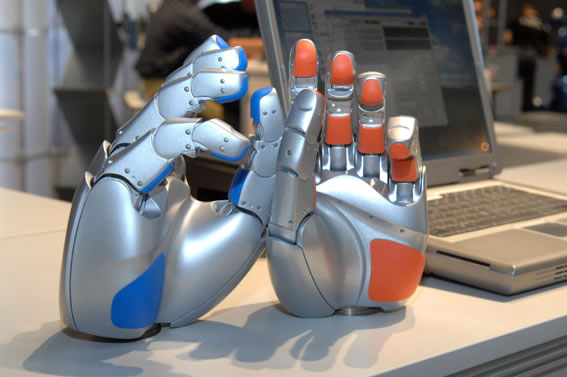
人間の手が自然界で最も精巧で万能な道具であることは疑いありません。この進化した構造物の特徴と利点は、長年専門家による研究の対象となってきました。これらの研究成果が今、未来を担うロボットハンド開発のために役立てられています。ドイツ航空宇宙センター (DLR) はハルビン工業大学 (HIT) と共同で、新しいロボットハンドを開発しました。精密な超小型駆動技術と高性能バス技術を応用したこの新開発により、人間の手をモデルに作られるグリッパに新しい基準を打ち立てました。この新開発のDLR-HIT-Hand IIは5本の指からなり、各指はそれぞれ4つの関節と3段階の自由度を持ちます。また旧モデルDLR-HIT-Hand Iと比較して、より小型で軽量となりました。4本指は円錐形の部品をつかむために、また親指は逆方向からの押さえとして機能します。ロボットハンドを自在に駆使するためには、さまざまな機械的動作が的確に制御・監視される必要があります。そのため、高性能の情報路が必要不可欠となるのです。
高速バスによる制御
DLR-HIT-Hand IIでは、モータがそれぞれの指に内蔵されています。そのため、各指の位置データや運転データといった制御コンピュータ用の情報に特に注意を払わなければなりません。こうすることによってのみ、各指個別駆動の強みを現場で最大限に発揮することができます。そのため各関節には、独自に開発された非接触式の角度センサおよびトルクセンサが組み込まれています。この用途では両センサに非常に高い分解能が要求されます。そこで発生した大量のデータを転送するのが高速バスです。設定値と実際値を比較するための迅速なフィードバックは、特に精密で複雑な用途において、コントローラ機能にとって決定的な要素となります。そのためデータ量の他にも、とりわけ転送速度が重要となってきます。ロボットハンドに内蔵されたリアルタイムの25 Mbps高速バスは、FGPA (Field Programmable Gate Array) を基にこの用途のために特別に開発されました。ロボットハンドと制御コンピュータとをつなぐ外部シリアル接続に必要な配線は3本のみです。実際の制御システムであるPCIカード上のシグナルプロセッサは、標準PCに内蔵されています。使いやすいインターフェースにより、PCからロボットハンドを制御することができます。すべてのセンサデータは画面に表示させることができます。データ表示、制御システム、ロボットハンドからコンピュータへの接続は、将来的に産業環境で活用されることを念頭にして実用的に設計されています。
マクソンフラットモータでの駆動
指にはそれぞれ、個別に制御可能な駆動装置が、数個ずつ取り付けられています。つまりロボットハンド1機につき、ホールセンサ付きブラシレスDCモータが15個使用されているのです。マクソンのEC 20 flatによる駆動は、複数の必要条件を同時に満たします。つまり安価で、製品として市販されており、超小型でありながら高い出力密度を持つのです。モータユニットはホールセンサも含めて外径が21.2 mm、長さがたった10.4 mmとなります。モータ重量は 15グラム。モータは同直径のHDUC 05シリーズのハーモニックドライブのギアヘッドと接続され、ひとつのユニットを形成します。3 Wattのモータには、12 Vまたは24 V仕様があり、最大トルク8.04 mNmまでを出力します。優れた動的挙動とプリロード仕様のボールベアリングが、回転方向を変更するといった制御コマンドへの正確な応答挙動を可能にします。デジタルホールセンサが、制御装置に実際の位置を常に正確に報告します。アイドル状態でモータは9,300 rpmで回転します。
フィードバック機能のついたコンパクトな駆動系と、バス技術を用いた高速データ転送を応用することで、新しいDLR-HIT-Hand IIでは非常に繊細で正確な制御が可能になりました。マイクロマシンとマイクロエレクトロニクスの技術がお互いを完璧に補完しているといえます。以前は特別にコストをかけて開発しなければならなかったような製品の生産が、今日では標準部品と優れたコンセプトがあれば可能となったのです。
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}