
ポケットサイズのデルタロボット
マイクロアセンブリのタスクは今日では多岐に渡り、駆動技術にはますます多くの課題が課せられています。マイクロコンポーネントとマイク ロシステムの小型化が進む一方で、巨視的次元の生産システムの発展は遅れがちです。市場に革命を起こしたのは、西スイスのAsyril社のデルタロボット の製品群。強力なマクソンが、高精度かつダイナミックな動きを生み出します。
Asyril社の得意分野は、マイクロテクノロジー、ナノテクノロジー、バイオテクノロジーの小型コンポーネントや小型部品を迅速かつ柔軟に自動で取り扱うためのメカトロニクスシステムの開発および統合です。Asyril社は2007年、マイクロロボット工学の専門家アラン・コドゥレー博士により、CSEMとCPAグループの技術的ノウハウをベースに設立されました。会社設立以前からの核心的問題は、そもそも大きさ100 x 100 x 100 mm3のマイクロロボットを組み立てることができるかどうか、そのようなロボットの運動をどのようにすれば理想的な形で作ることができるか、という点でした。すでに約10年前に、CSEM(スイスマイクロテクニックエレクトロニックセンター)の研究者たちは、ますます小型化するマイクロコンポーネントと旧態依然の生産システムとの間の矛盾がますます大きくなっていることに気づいていました。ロボットの機械構造が比較的容易に小型化できるのに対して、駆動装置の小型化には限界があります。「従来のシステムではモータがメカニズム部分に比べて非常に大きいままで、例えばアーム型ロボットの従来の運動でも不向きであることがわかりました。それというのも昔と同じように、アームの関節部分には大型モータが組み込まれているからです。」とアラン・コドゥレー博士は述べています。
ますます大きくなるこの矛盾から抜け出すために、コドゥレー氏を中心としたCSEMおよびスイス・ベルン州ビール専門学校のマイクロロボット工学専門家研究チームは、マイクロ技術の部品の取り扱いにはるかに適したシステムを模索し始めました。「パラレルリンク構造が私たちの目的に最も有望であるという結論に達しました。」とコドゥレー氏は語ります。
そこでまずパラレルリンク軸システムについてのアイデアが完璧に練られました。質量慣性モーメントをできる限り小さくするためには、すべてのコンポーネントはできる限り精密に、しかも重量を抑えて作られます。選択されたデルタ構造の大きな利点は、マクソンがメカニズムの運動を生み出すものの、モータ自身は動かないという点にあります。そのかわりにモータは支持フレームに固定されて、運動を直接構造に伝えます。この構造原理はデルタロボットの製品群の全てに適用されており、「Desktop Delta」、「Power Delta」、「Pocket Delta」といったモデルはすべて同一原理に基づいて作られています。
マイクロアッセンブリのスリムな駆動装置技術
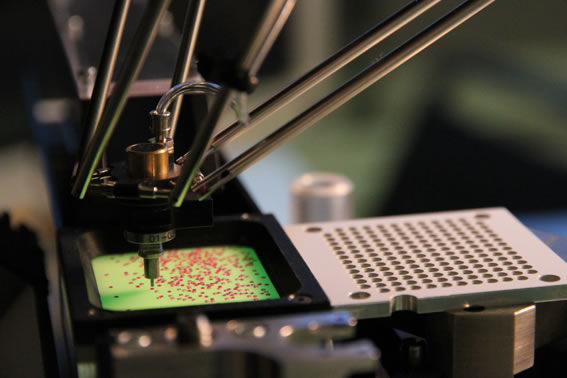
スリムになったのはメカニズムだけではありません。駆動装置そのもののスペースも節約されました。高出力と高放熱の巨大なモータのかわりに、ポケットデルタでは省スペースのマクソン小型モータが使われています。ロボットのパラレルリンク・メカニズムは、ロボット上部の同一プレートの上の3個のEC-i 40によって駆動します。動かされる重量が非常にわずかであることから、ロボットが非常にダイナミックに動けるようになりました。ポケットデルタはピックアンドプレース1サイクルが0.33秒なので1秒に3サイクル可能です。運動構造の高い安定性とあいまって、ロボットは3μm以下の精度で反復することができます。
ブラシレスDCモータはわずか直径40 mmで出力が50Wです。デルタロボットに速度だけでなく精密さをも求めるなら、モータの角度位置も正確に測定する必要があります。位置把握のためモータは直接高解像度のエンコーダにつながっています。また各モータはAsyril社独自設計のブレーキを用いています。小さなピンを使い、ばねでモータ軸を止めています。ピンはロボットの作動中には電磁石によって引っ張られ、ブレーキを解除します。またロボットの制御装置は完全にロボットに統合されており、通信はEthernetを通じて行われます。このミニロボットはその特性上、小型コンポーネントの迅速な移動や組み立てに非常に適しています。デルタロボットはそのカテゴリーでは最も速く、最も正確なロボットの1つとされています。この設計構造を選ぶもう1つの利点は、ポケットデルタはギアヘッドを必要としないということです。
ポケットデルタロボットはさまざまな産業分野で利用されています。とりわけ時計産業におけるマイクロコンポーネントの選別、選択、加工は典型的な例で、ネジやリベット、ボルト、あるいは歯車などの、機械式時計のほぼ全部品の取り付けに適しています。また医療技術や電子産業、半導体産業においてもポケットデルタが活用されています。動かす部品のサイズは一般的に0.5~15 mmです。
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}