
腱志郎:160の筋肉を持った強力なロボット
東京大学の研究室が、長年にわたる研究を経て160の人工筋肉を持つ腱駆動ヒューマノイドロボットを誕生させました。身長わずか158 cmのロボットに内蔵された約100個のマクソンブラシレスモータが、人間の筋の収縮を再現し、人間に似た動作を実現します。
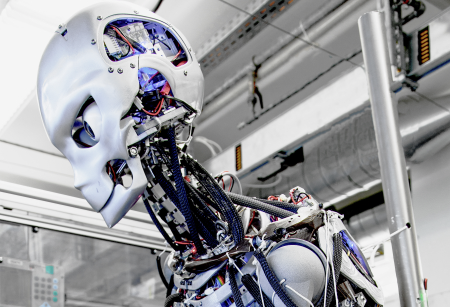
人間の動作をまるで生きているかのように模倣できる腱駆動ヒューマノイドロボットが東京大学で開発されました。ロボットの名前「ケンシロウ」は、80年代に流行った漫画の主人公の名前を連想させます。研究者たちはこのロボットの開発にあたり、できるかぎり自然な動きをする人造人間を作るために人間の生体構造に注目しました。「私たちは人間の動作と外観を理解し、それを腱志郎でできるだけ正確に再現することを目指しました」と岡田慧准教授は説明します。身長158 cm、体重50 kgのこのロボットは、日本人中学生男子をモデルとした体型をしています。
人体構造にできるだけ近づけるため、腱志郎には人間の主要な筋肉が脚部に52、胴体に36、腕に44、そして首に25の合計約160あります。これほどの数の筋肉を持ったヒューマノイドロボットは前例がありません。参考までに、人間には約640の筋肉があり、非常に複雑な構造をしています。腱志郎の160の筋肉は、個別に腱駆動されることで人間に似た動作パターンを再現することができます。しかし、人間の生物的な動作パターンは極めて複雑で、すべての動作を模倣することはできません。それでも腱志郎はさまざまな動作パターンに応じて、腕、足、上半身を動かすことができます。ただし、本当に自然に歩けるようになるにはまだ訓練が必要です。それでは、ロボットはどのようにして人間に似た動作を習得するのでしょうか?それは全く簡単です。ロボットにその動作をして見せて、ロボットにそれを模倣させるのです。この単純な習得方法には、オープンソースのインテリジェントなソフトウェアが使用されます。しかし、歩行はそれだけで習得できるわけではありません。
腱志郎の骨はアルミ製で、人間の骨と同じように相互に連動します。体重50 kgのロボットを作ることは、稲葉雅幸教授率いる研究者グループにとって最も困難な課題でした。大人の身長のロボットでは体重は約100 kgに達し、それは負荷の増加、消費エネルギーの増加、そして動作の緩慢化を意味します。
160の筋肉に93個のモータ
東京大学情報システム工学研究室 (JSK) の研究者たちは、ドライブシステムにマクソン製品を採用しました。腱志郎の160の筋肉は、93個のマクソン EC (BLDC) モータによって収縮されます。筋肉の中でも腹筋や胸筋などの特別な筋肉の収縮は、1個のモータによって行われます。この役割を担っているのは、マクソンのEC 16およびEC 22ブラシレスモータです。電子的な整流回路を持つサーボモータは、優れたトルク特性、高出力、非常に広い回転数範囲、そして当然のことながら長寿命という特徴を持っています。筋肉の収縮にはパワフルなBLDCモータが必要となるため、それに用いられるマクソンは60~100 Wの出力を発揮します。この他にモータを選定するポイントとなったのはモータの発熱特性です。ロボット内部での冷却は不可能であったため、岡田慧准教授はモータが過熱しないことを特に重要視していました。
JSKでは1980年以降、サービスロボットや産業用ロボットから腱志郎のような人間型ロボットまで、さまざまなロボットを製作しています。腱志郎はその前身となった腱太、小太郎、小次郎、腱臓と同様に、身体をできるだけ本物に近く模倣することを目標としています。それには人間に似た外観を持つことも不可欠です。そのため、研究者たちは現在、ロボット用の皮膚の開発に取り組んでいます。近い将来、腱志郎はより活動的に自分の環境に馴染むことができるようになる予定です。また、安定して歩行することが腱志郎の次の目標です。
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}