
宇宙の暗黒エネルギー
HETDEXプロジェクトとは、宇宙の「暗黒エネルギー」を見つけるための初の本格的な試みであり、100万個の銀河の位置が特殊スペク トログラフを用いて立体的に記録されます。2012年夏、ホビー・エバリー望遠鏡は宇宙のスキャニングを開始しました。もちろんマクソンはここでも 活用されています。
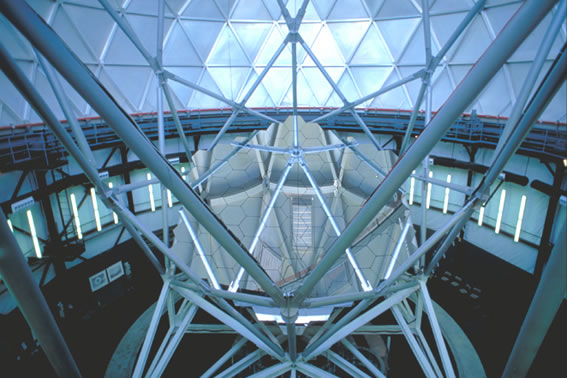
ホビー・エバリー望遠鏡 (HET) はテキサス州西部のマクドナルド天文台にあります。望遠鏡の球状の主鏡は、長さ1メートルの6角形の分割鏡91枚により構成され、これらの鏡が同時に駆動すると全体で直径11メートルほどに達し、世界最大の鏡となります。主鏡の有効口径は、4分*の開口角の場合、現在のところ9.2メートルであり、11.1 x 9.8メートルのサイズを持つHETは世界で4番目に大きな光学望遠鏡です。また、斬新なデザイン設計により、大幅なコストダウンを実現しました。わずか1,350万ドルの製造費は、同規模の望遠鏡のおよそ4分の1にすぎません。このコスト削減は、簡略化と市販の部品の利用によって可能となりました。
天体観測用の分光望遠鏡は、Prime Focus Instrument Package (PFIP) に搭載され、中分解能と高分解能の2つのスペクトログラフを用いています。また、第2軸の重さ85トンの望遠鏡の可動性を断念した代わりに、その分、更なるコスト削減が可能になりました。つまり、鏡は常に地平線から55度の一定の高さに向けられています。しかし水平方向には自由に向きを変えられるので、空の70パーセントを観察することができます。主鏡によって集められた光は主鏡の上部に集められ、そこで特殊補助レンズを使って捕捉され、光ファイバーを通じてスペクトログラフに導かれます。この補助レンズは、6本の軸で動く「トラッカー」に組み込まれています(図3参照)。つまり鏡がレンズに従って動くのではなく、レンズが環の上方を移動します。
現在、HETの広角装置を拡張する工事が行われており、これにより視野角が22分角まで、有効口径が10メートルにまで高められます。将来の研究プロジェクトを見据え、グラスファイバーでできる限り大きな光量を集めることによって、分光器による観察における革命が起ころうとしています。研究者たちは新しく拡張されたHETを使って、いわゆる「暗黒エネルギー」の理解を深めようとしているのです。現在の仮説では、宇宙全体の物質とエネルギーの約4分の3は「暗黒エネルギー」で構成されており、年々宇宙の膨張が加速しているのもこの謎の力のためだと考えられています。
HETDEXが宇宙を覗く
この謎の手がかりをつかむために生まれたのが、HETDEXプロジェクト(Hobby-Eberly Telescope Dark Energy Experiment/ホビー・エバリー望遠鏡暗黒エネルギー実験)です。2012年から2015年までに、おおぐま座の領域が集中的にHETによってスキャニングされる予定です。この研究プロジェクトの目標は、地球から100~110億光年の距離にある100万個の銀河についての詳細地図を作成することです。プロジェクトは、テキサス大学オースティン校、ペンシルバニア州立大学、テキサスA&M大学、ミュンヘン大学天文台、ポツダム天体物理天文台、マックス・プランク地球外物理学研究所の共同研究として発足しました。
世界各国の科学者たちは宇宙で起こる出来事についての知識を深めようとしています。この大規模な研究プロジェクトは、現在の正論である重力法則の正当性を解明し、ビッグバンに関する新しい天文学的な細部を明らかにするはずです。テキサスのフォークス山にある天文台では、HETDEXカメラの光が写真のチップでではなく、33,400本のグラスファイバーによって導かれています。専門家たちは、私たちの宇宙を膨張させるのが暗黒物質ではなく、未知の重力効果でないかと期待しています。早ければ2016年には、暗黒物質について手がかりとなるような発見があるか、さもなければ、そうした現象が決定的に存在しないと解明されることでしょう。
PFIPの構造
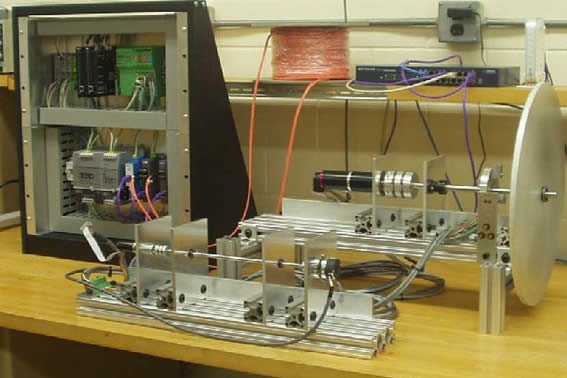
PFIPは望遠鏡の最上部にあるトラッキング装置の上に設置され、広角補正、捕捉カメラ、測定装置、焦点面システムを備えています。PFIPは12のサブシステムと24本の運動軸を持った自立的な自動化ユニットで、モーションコントローラとモジュール式I/Oシステムが、CANopenメッセージプロトコルを介してつながっています。地上の各システムとPFIPサブシステム間の通信全体は、Ethernetを介して2点間で行われるか、CANopenメッセージを通じてEthernet-/CANゲートウェイを介して行われます。
PFIPの24本の運動軸のうち、15本がモータによって動かされています。どんな速度でも一定かつ正確に動く必要がありますが、極端に遅い速度の場合これは特に重要になります。運動制御は多様なシチュエーションで様々な操作で実行される必要があります。例えば、速度曲線を正確に追跡すること(絞り制御)、正確に発進してある1点で完全停止すること、多軸的な位置および速度曲線を追跡することが挙げられます。
PFIPサブシステムで使用される駆動装置はマクソンのブラシレスECシリーズであり、必要に応じてギアヘッドや磁気式インクリメンタルエンコーダ、電気ブレーキを装備することができます。遅い速度での規則的な動きは正弦波整流を使って生み出されます。そのため、ブラシレスモータに標準内蔵されたホールセンサに加え、インクリメンタルエンコーダがオプションで使用されます。インクリメンタルエンコーダは制御装置に位置データを渡します。
正確なマクソンの位置制御ユニット
コントローラはすべてマクソン EPOS2 50/5タイプの位置制御ユニットです。電流・速度・位置用の閉ループ制御に加えて、コントローラには補間運動モード(Interpolated Position Mode)が備わっており、プログラム制御された多軸運動曲線を追跡することができます。さらに、EPOS2にはCANopenインターフェースを通じてアクセス可能なアナログおよびデジタルの入出力機器が備わっています。また、正負限界値、原点スイッチ、クイックストップ、駆動装置のスイッチのオン・オフといったデジタルの入力信号に対する反応をプログラミングすることも可能です。PFIPではCANopenバスカプラを装備したモジュール式I/Oステーションによって、追加されたすべてのI/O機器が直接にCANバスを介して、あるいはEthernetに基づくCANゲートウェイを介して呼びかけられます。ゲートウェイには設定と双方向のメッセージ送信のための簡単なASCIIプロトコルが用いられます。
この用途ではハードウェア機器はCAN busに接続されており、マスター/スレーブ設定でPFIPコンピュータ (PCC) によって制御されます。多軸運動においては、PCCは例えば、ある動作のために設定した複数の運動制御を1つのCANopen命令のみで実行します。一般にPFIP運動制御は24 Vの直流電流で作動します。絞りのようなより高い慣性負荷には48 Vの供給も可能で、EPOS2 50/5コントローラで対応可能です。PFIPとHETのための仕様を満たすためには、すべてのハードウェアコンポーネントが -10°C以下の温度でも機能しなければなりません。マクソンの多彩なラインナップの製品はそうした温度条件を満たし、産業のオートメーション装置の要求基準に適した品質や動作の確実性、頑丈さを提供します。
HETの設計構造は全体的にとてもフレキシブルです。運動制御、I/Oモジュール、電源を付け加えるあるいは取り外すことによって、大きな変更が非常に簡単になります。コンポーネントは小型かつ軽量であり、初期設計の段階ですでに、将来の拡張に伴い部品が追加されることが考慮されています。
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}