仕様
| 製品 |
| 質量 |
7 g |
| モータ |
| DCモータの運転可能範囲(W) |
120 W |
| ECモータの運転可能範囲(W) |
120 W |
| センサ |
| センサなし(DCモータ) |
可 |
| インクリメンタル・デジタルエンコーダ(2チャンネル、単一端) |
可 |
| インクリメンタル・デジタルエンコーダ(2チャンネル、差動) |
可 |
| インクリメンタル・デジタルエンコーダ(3チャンネル、差動) |
可 |
| デジタル・ホールセンサ(ECモータ) |
可 |
| SSIアブソリュートエンコーダ |
可 |
| 運転モード |
| 電流制御 |
有り(トルク) |
| 回転数制御(クローズド・ループ) |
可 |
| 位置制御 |
可 |
| 電気的データ |
| 電源電圧Vcc (最小値) |
10 V |
| 電源電圧Vcc (最大値) |
24 V |
| ロジック電源電圧Vc(オプション) |
10 V |
| ロジック電源電圧Vc(オプション) |
24 V |
| 最大出力電圧 |
0.9 |
| 最大出力電流Imax |
15 A |
| 最大出力電流Imax |
10 s |
| 連続出力電流 Icount |
5 A |
| PWM周波数 |
50 kHz |
| PI電流制御周波数 |
25 kHz |
| PI回転数制御周波数 |
2.5 kHz |
| PID位置制御周波数 |
2.5 kHz |
| 最大効率 |
98 % |
| 最大回転数(DCモータ) |
100000 rpm |
| 最大回転数(1磁極ペアモータ、矩形波整流) |
100000 rpm |
| 最大回転数(1磁極ペアモータ、正弦波整流) |
50000 rpm |
| 入力 |
| ホールセンサ信号 |
H1, H2, H3 |
| エンコーダ信号 |
A, A\, B, B\, I, I\ |
| エンコーダ入力最大周波数 |
6.2 MHz |
| センサ信号 |
Clock, Data |
| デジタル入力 |
5 |
| デジタル入力の機能 |
limit switch, reference switch, general purpose, touch probe |
| アナログ入力 |
2 |
| 分解能、電圧範囲、回路 |
12 bit、-10~+10V、差動 |
| アナログ入力の機能 |
General Purpose, Set Value Current, Set Value Velocity |
| 出力 |
| デジタル出力 |
3 |
| デジタル出力の機能 |
保持ブレーキ、汎用 |
| アナログ出力 |
1 |
| 分解能、電圧範囲 |
12 bit、-4~+4V |
| アナログ出力の機能 |
General Purpose |
| 電圧出力 |
| ホールセンサ用電源 |
「センサ電源電圧」を参照 |
| エンコーダ用電源 |
「センサ電源電圧」を参照 |
| センサ電源電圧 |
+5 VDC, max. 145 mA |
| インターフェイス |
| USB (Full Speed) |
有り |
| EtherCAT |
IEC 61158 Type 12 Slave |
| CoE (CAN application layer over EtherCAT) |
CiA 402 |
| FoE (File transfer over EtherCAT) |
有り |
| 分散クロックサポート |
可 |
| 可変PDOマッピング |
可 |
| 表示 |
| READY表示 |
緑LED |
| ERROR表示 |
赤LED |
| 保護機能 |
| 保護機能 |
電流制限、過電流、過熱、最小/過大電圧、過渡電圧、モータ配線の短絡、フィードバック信号の欠落 |
| 環境条件 |
| 最小使用温度 |
-30 °C |
| 最大使用温度 |
40 °C |
| 温度:拡張 |
+40…+60 °C, Derating: -0.25 A/°C |
| 最小保存温度 |
-40 °C |
| 最大保存温度 |
85 °C |
| 最小湿度(結露なきこと) |
5 % |
| 最大湿度(結露なきこと) |
90 % |
| 機械的特性 |
| 重量 |
7 g |
| 寸法(長さ) |
36.5 mm |
| 寸法(幅) |
27 mm |
| 取付穴 |
M2ネジ用の取り付け穴 |
| ソフトウェア |
| インストールプログラム |
EPOS Setup |
| グラフィカル・ユーザ・インターフェイス |
EPOS Studio |
| OS |
Windows 11, 10 |
| Windows DLL |
32/64 bit |
| サンプルプログラム |
MS Visual C#, MS Visual C++, MS Visual Basic, MS Visual Basic.NET, Borland C++, Borland Delphi, NI LabView, NI LabWindows/CVI |
| Linux Shared Object ライブラリ |
X86 32-/64-bit, ARMv6/v7/v8 32-bit, ARMv8 64-bit |
| サンプルプログラム |
C++ |
| 機能 |
| CANopen Profile Position Mode |
可 |
| CANopen Profile Velocity Mode |
可 |
| CANopen Homing Mode |
可 |
| CANopen Cyclic Synchronuous 位置制御 |
可 |
| CANopen Cyclic Synchronuous 回転数制御 |
可 |
| CANopen Cyclic Synchronuous トルク制御 |
可 |
| アナログ電圧指令 |
可 |
| フィードフォワード位置制御 |
可 |
| フィードフォワード回転数制御 |
可 |
| Dual Loop位置/回転数制御 |
可 |
| Position Marker / Touch Probe |
可 |
| Quickstop |
可 |
| イネーブル |
可 |
| 保持ブレーキ制御 |
可 |
| オート・チューニング |
可 |
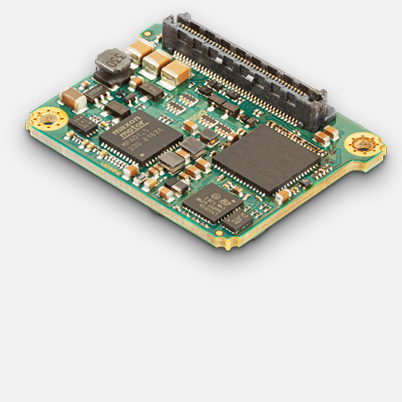
説明
The EPOS4 Micro 24/5 EtherCAT is a miniaturized OEM positioning control module for integration into single- or multi-axes motion control systems. Suitable for controlling a brushed DC motor with encoder or a brushless EC motor (BLDC) with Hall sensors and encoder up to 120 W / 360 W.
動画